

0
Owner's of the DJI Video Games DJI Phantom 2 Vision Drone gave it a score of 0 out of 5. Here's how the scores stacked up:
















Assembly and Use
18
©
2014 DJI. All Rights Reserved.
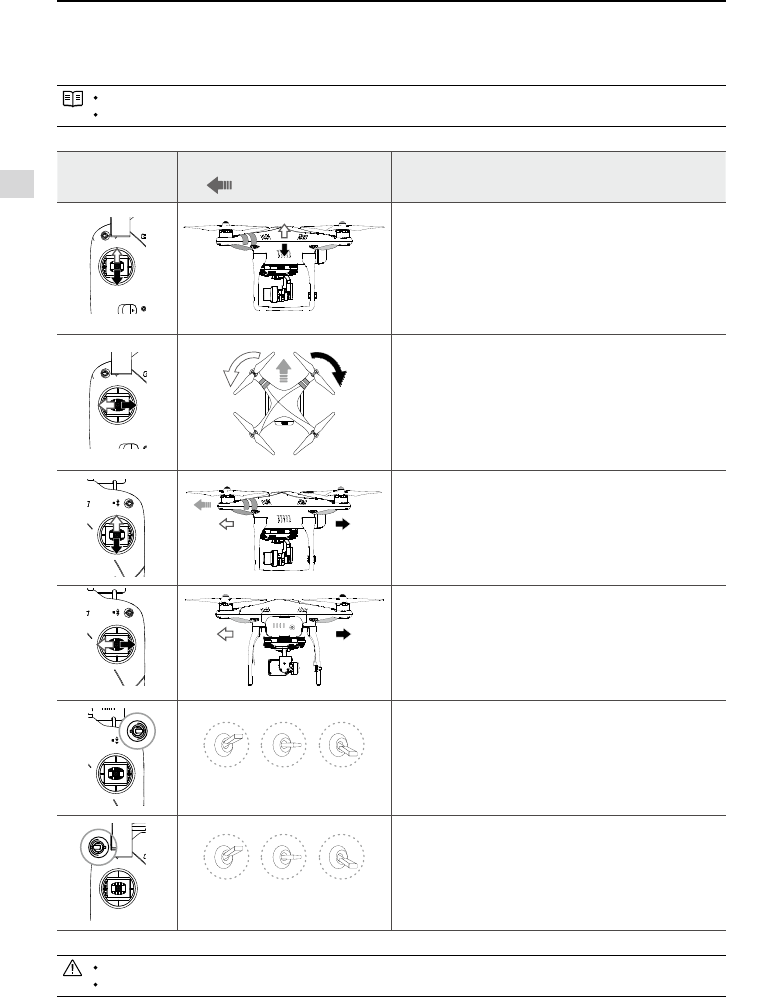
5.5 Remote Control Operation
The Remote Control is set to Mode 2 by default.
Stick Neutral/ mid point: Control sticks of the Remote Control are placed at the central position.
Move the Stick: The control stick is pushed away from the central position.
Remote Control
(Mode 2)
Aircraft
(
indicates nose direction)
Operation details
Vertical movements on the left stick control elevation.
Push the stick up to ascend and down to descend.
When both sticks are centered the Phantom will hover in
place.
Push the throttle stick upward beyond the centered
(neutral) position to take off. Push the throttle gently to
prevent sudden and unexpected elevation.
Horizontal movements on the left stick control the rudder.
Push left to rotate counter clock-wise and right for
clockwise. If the stick is centered, the Phantom will fly
straight.
The more the stick is moved, the faster the Phantom will
rotate.
Vertical movements on the right stick control forward and
backward pitch.
Push up to fly forward and down to fly backward. The
Phantom will hover in place if the stick is centered.
Push the stick further for a larger pitch angle (maximum
35˚) and faster ight.
Horizontal movements on the right stick control left and
right pitch.
Push left to y left and right to y right. The Phantom will
hover in place if the stick is centered.
Push the stick further for a larger pitch angle (maximum
35˚) and faster ight.
Position 1 Position 2 Position 3
The S1 switch is used for compass calibration.
Toggle the S1 from position 1 to position 3 and back
approximately 5 times to enter into compass calibration
mode.
In Naza-M mode, the S1 switch is used to switch
between control modes and enter compass calibration.
Position 1 Position 2 Position 3
S2 is used to record a Home point manually. After a
Home point has been recorded automatically, flipping
S2 from position 1 to position 3 and back 5 times (or
more) rapidly will move the Home point to the Phantom’s
current location.
In Naza-M working mode, S2 is be used for IOC.
In ‘Ready to Fly’ mode, the Phantom will hover when all sticks are released.
In ‘Ready to Fly (non-GPS)’ the Phantom will lock its altitude but will not have horizontal positioning.
Preparing the Remote Control

Find Your Products By Category
Please Login
